.png)
D5-1200-P0
Introduce
On the basis of the classic high-speed параллельный робот configuration, the end-of-freedom is expanded. It has the features of translation along XYZ axis and rotation around Z axis and Y axis. With a high-precision robot vision system, it is not only suitable for high-speed sorting of light and small scattered materials at multiple angles in the horizontal plane, but also suitable for complex scenes where materials are picked and placed at multiple angles on the vertical plane.
Characteristic
1、With 3+2 degrees of freedom, it is easy to arrange complex scenes.
2、The standard cycle time is less than 0.5s, which satisfies the pursuit of maximum speed and minimum volume requirements.
3、Special rotating shaft hinge design can easily cope with high-intensity and high-frequency repetitive motion requirements
4、It is very suitable for high-speed and high-precision production operations in small spaces, 3C manufacturing and other industries. It is mainly used for assembly, handling, and testing of small workpieces.
Detailed product parameters
| Model | Axes | Payload | Manipulator | Repeatability | Rotation range | Vertical rotation range | Allowable maximum moment of inertia | Angle range of actuated arm | Power supply | Power capacity | Rated Power | Storage temperature | Work environment | Protection | |||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| D5-1200-P0 | 3+2 | 2kg | Weight | Diameter | Position | Rotation | ±360º | ±90º | 31x10⁻⁴kg·㎡ | Up | Down | Three-phase 380VAC -10%~+10%, 49~61HZ | 3KVA | 1.3kw | -10℃~70℃ | -10℃~50℃,RH≤80% | IP55 |
| 90kg | 1200mm | 0.05mm | 0.1º | 36.5º | 70.5º | ||||||||||||
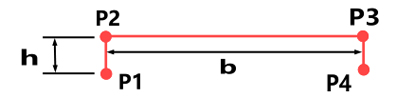
Load - frequency
| Name | Loop mode | Movement Distance |
|---|---|---|
| Trajectory1 | P1→P2→ P3→ P4 →P3 →P2 →P1 | h=25, b=305 |
| Trajectory2 | P1→P2→ P3→ P4 →P3 →P2 →P1 | h=25, b=500 |
| Trajectory3 | P1→P2→ P3→ P2 →P1 | h=25, b=305 |
| Trajectory4 | P1→P2→ P3→ P2 →P1 | h=25, b=500 |
Drawing
-
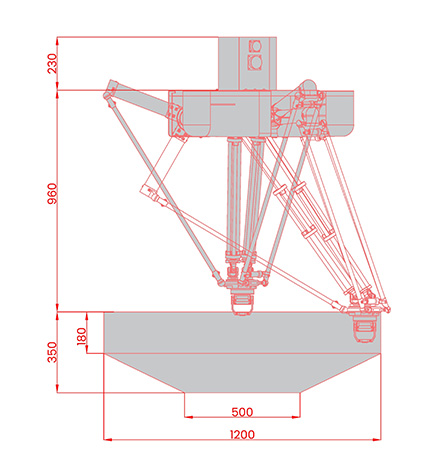
01.Outline dimensions and Working range(mm)
-
02.Flange(mm)
.jpg)
-
03.Base installation(mm)
.jpg)

.png)